A Novel Greeting System Selection System for a Culture-Adaptive Humanoid Robot
Tatsuki KANAGAWA Yasutaka HIGA
A Novel Greeting System Selection System for a Culture-Adaptive Humanoid Robot
Tatsuki KANAGAWA Yasutaka HIGA
Concurrency Reliance Lab
Abstract: Robots and cultures
Robots, especially humanoids, are expected to perform human-like actions and adapt to our ways of communication in order to facilitate their acceptance in human society.
Among humans, rules of communication change depending on background culture.
Greeting are a part of communication in which cultural differences are strong.
Abstract: Summary of this paper
In this paper, we present the modelling of social factors that influence greeting choice,
and the resulting novel culture-dependent greeting gesture and words selection system.
An experiment with German participants was run using the humanoid robot ARMAR-IIIb.
Introduction: Acceptance of humanoid robots
Acceptance of humanoid robots in human societies is a critical issue.
One of the main factors is the relations ship between the background culture of human partners and acceptance.
ecologies, social structures, philosophies, educational systems.
Introduction: Culture adapted greetings
In the work Trovat et al. culture-dependent acceptance and discomfort relating to greeting gestures were found in a comparative study with Egyptian and Japanese participants.
As the importance of culture-specific customization of greeting was confirmed.
Acceptance of robots can be improved if they are able to adapt to different kinds of greeting rules.
Introduction: Methods of implementation adaptive behaviour
Adaptive behaviour in robotics can be achieved through various methods:
reinforcement learning
neural networks
generic algorithms
function regression
Introduction: Greeting interaction with robots
Robots are expected to interact and communicate with humans of different cultural background in a natural way.
It is there therefore important to study greeting interaction between robots and humans.
ARMAR-III: greeted the Chancellor of Germany with a handshake
ASIMO: is capable of performing a wider range of greetings
(a handshake, waving both hands, and bowing)
Introduction: Objectives of this paper
The robot should be trained with sociology data related to one country, and evolve its behaviour by engaging with people of another country in a small number of interactions.
For the implementation of the gestures and the interaction experiment, we used the humanoid robot ARMAR-IIIb.
As the experiment is carried out in Germany, the interactions are with German participants, while preliminary training is done with Japanese data, which is culturally extremely different.
Introduction: ARMAR-IIIb
Introduction: Target scenario
The idea behind this study is a typical scenario in which a foreigner visiting a country for the first time greets local people in an inappropriate way as long as he is unaware of the rules that define the greeting choice.
(e.g., a Westerner in Japan)
For example, he might want to shake hands or hug, and will receive a bow instead.
Introduction: Objectives of this work
This work is an application of a study of sociology into robotics.
Our contribution is to synthesize the complex and sparse data related to greeting types into a model;
create a selection and adaptation system;
and implement the greetings in a way that can potentially be applied to any robot.
Greeting Selection: Greetings among humans
Greetings are the means of initiating and closing an interaction.
We desire that robots be able to greet people in a similar way to humans.
For this reason, understanding current research on greetings in sociological studies is necessary.
Moreover, depending on cultural background, there can be different rules of engagement in human-human interaction.
Greeting Selection: Solution for selection
A unified model of greetings does not seem to exist in the literature, but a few studies have attempted a classification of greetings.
Some more specific studies have been done on handshaking.
Greeting Selection: Classes for greetings
A classification of greetings was first attempted by Friedman based on intimacy and commonness.
The following greeting types were mentioned: smile; wave; nod; kiss on mouth; kiss on cheek; hug; handshake; pat on back; rising; bow; salute; and kiss on hand.
Greenbaum et al. also performed a gender-related investigation, while [24] contained a comparative study between Germans and Japanese.
Greeting Selection: Factors on Classification
‘terms’ : same terms with different meanings, or different terms with the same meaning.
‘location’ : influences intimacy and greeting words. (private or public)
‘intimacy’ : is influenced by physical distance, eye contact, gender, location, and culture. (Social Distance)
‘Time’ : time of the day is important for the choice of words.
‘Politeness’, ‘Power Relationship’, ‘culture’ and more.
Greeting Selection: Factors on Classification
the factors to be cut are greyed out.
Model of Greetings: Assumptions (1 - 5)
The simplification was guided by the following ten assumptions.
Only two individuals (a robot and a human participant): we do not take in consideration a higher number of individuals.
Eye contact is taken for granted.
Age is considered part of ‘power relationship’
Regionally is not considered.
Setting is not considered
Model of Greetings: Assumptions (6 - 10)
Physical distance is close enough to allow interaction
Gender is intended to be a same-sex dyad
Affect is considered together with ‘social distance’
Time since the last interaction is partially included in ‘social distance’
Intimacy and politeness are not necessary
Model of Greetings: Basis of classification
Input
All the other factors are then considered features of a mapping problem
They are categorical data, as they can assume only two or three values.
Output
The outputs can also assume only a limited set of categorical values.
Model of Greetings: Features, mapping discriminants, classes, and possible status
Model of Greetings: Overview of the greeting model
Greeting model takes context data as input and produces the appropriate robot posture and speech for that input.
The two outputs evaluated by the participants of the experiment through written questionnaires.
These training data that we get from the experience are given as feedback to the two mappings.
Model of Greetings: Overview of the greeting model
Greeting selection system training data
Mappings can be trained to an initial state with data taken from the literature of sociology studies.
Training data should be classified through some machine learning method or formula.
We decided to use conditional probabilities: in particular the Naive Bayes formula to map data.
Naive Bayes only requires a small amount of training data.
Model of Greetings: Details of training data
While training data of gestures can be obtained from the literature, data of words can also be obtained from text corpora.
English: English corpora, such as British National Corpus, or the Corpus of Historical American English, are used.
Japanese: extracted from data sets by [24, 37, 41-43]. Analyze Corpus on Japanese is difficult.
Model of Greetings: Location Assumption
The location of the experiment was Germany.
For this reason, the only dataset needed was the Japanese.
As stated in the motivations at the beginning of this paper, the robot should initially behave like a foreigner.
ARMAR-IIIb, trained with Japanese data, will have to interact with German people and adapt to their customs.
Model of Greetings: Mappings and questionnaires
The mapping is represented by a dataset, initially built from training data, as a table containing weights for each context vector corresponding to each greeting type.
We now need to update these weights.
feedback from three questionnaires
Whenever a new feature vector is given as an input, it is checked to see whether it is already contained in the dataset or not.
In the former case, the weights are directly read from the dataset
in the latter case, they get assigned the values of probabilities calculated through the Naive Bayes classifier.
The output is the chosen greeting, after which the interaction will be evaluated through a questionnaires.
Model of Greetings: Three questionnaires for feedback
answers of questionnaires are five-point semantic differential scale:
How appropriate was the greeting chosen by the robot for the current context?
(If the evaluation at point 1 was <= 3) which greeting type would have been appropriate instead?
(If the evaluation at point 1 was <= 3) which context would have been appropriate, if any, for the greeting type of point 1?
Model of Greetings: feedback and terminate condition
Weights of the affected features are multiplied by a positive or negative reward (inspired by reinforcement learning) which is calculated proportionally to the evaluation.
Mappings stop evolving when the following two stopping conditions are satisfied
all possible values of all features have been explored
and the moving average of the latest 10 state transitions has decreased below a certain threshold.
Model of Greetings: Summary
Thanks to this implementation, mappings can evolve quickly, without requiring hundreds or thousands of iterations
but rather a number comparable to the low number of interactions humans need to understand and adapt to social rules.
TODO: Please Add slides over chapter (3. implementation of ARMAR-IIIb)
Implementation on ARMAR-IIIb
ARMAR-III is designed for close cooperation with humans
ARMAR-III has a humanlike appearance
sensory capabilities similar to humans
ARMAR-IIIb is a slightly modified version with different shape to the head, the trunk, and the hands
Implementation of gestures
The implementation on the robot of the set of gestures it is not strictly hardwired to the specific hardware
manually defining the patterns of the gestures
Definition gesture is performed by Master Motor Map(MMM) format and is converted into robot
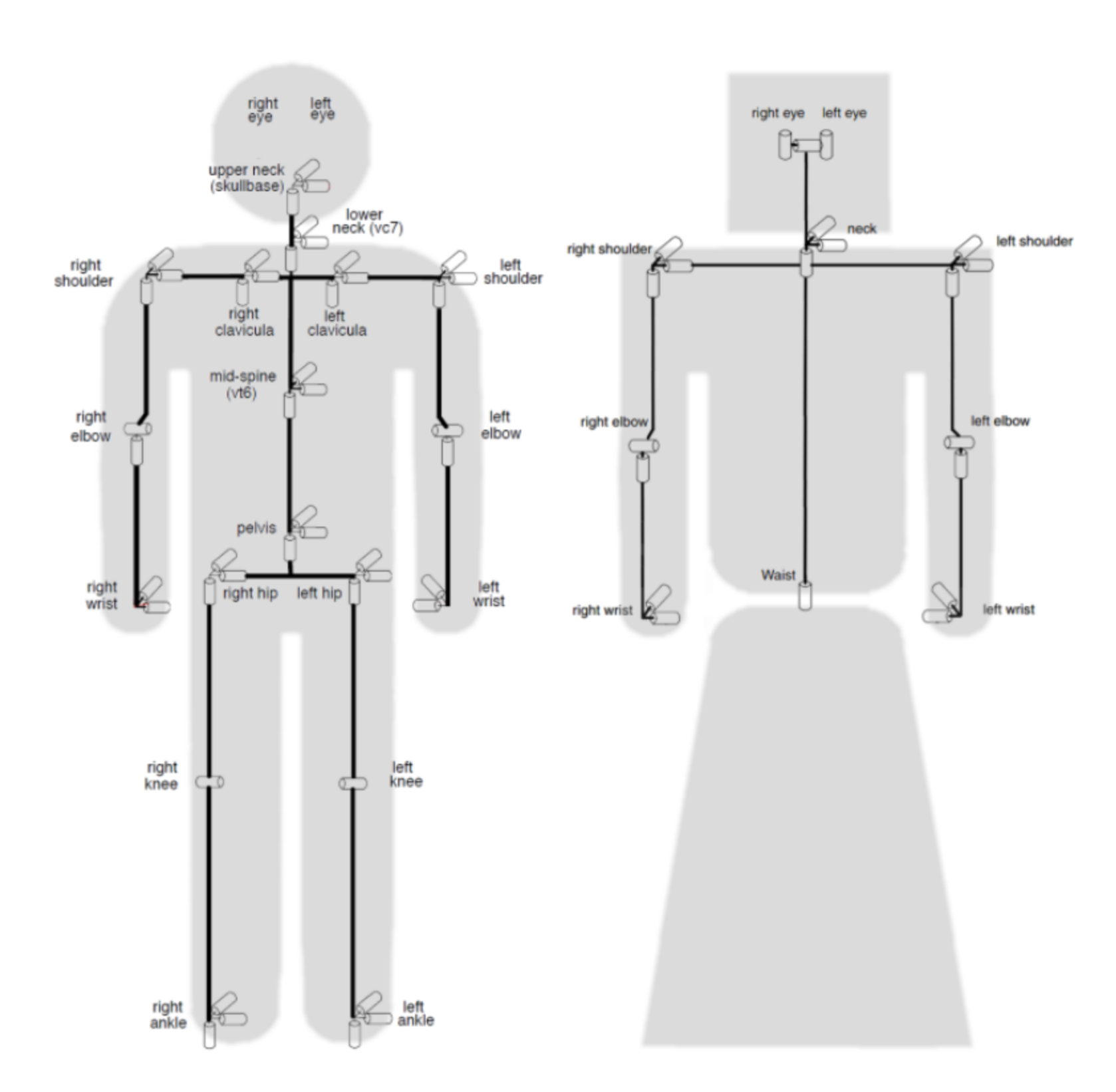
Master Motor Map
The MMM is a reference 3D kinematic model
providing a unified representation of various human motion capture systems, action recognition systems, imitation systems, visualization modules
This representation can be subsequently converted to other representations, such as action recognizers, 3D visualization, or implementation into different robots
The MMM is intended to become a common standard in the robotics community
Master Motor Map
Master Motor Map
The body model of MMM model can be seen in the left-hand illustration in Figure
It contains some joints, such as the clavicula, which are usually not implemented in humanoid robots
A conversion module is necessary to perform a transformation between this kinematic model and ARMAR-IIIb kinematic model
Master Motor Map
MMM support
The MMM framework has a high support for every kind of human-like robot
MMM can define the transfer rules
Using the conversion rules, it can be converted from the MMM Model to the movement of the robot
may not be able to convert from MMM model for a specific robot
the motion representation parts of the MMM can be used nevertheless
Conversion example of MMM
After programming the motion on the MMM model they were processed by the converter
the human model contains many joints, which are not present in the robot configuration
ARMAR is not bending the body when performing a bow
It was expressed using a portion present in the robot (e.g., the neck)
GestureExample
ImplementGestureARMARⅢ
Modular Controller Architecture, a modular software framework
The postures could be triggered from the MCA (Modular Controller Architecture, a modular software framework)interface, where the greetings model was also implemented
the list of postures is on the left together with the option
When that option is activated, it is possible to select the context parameters through the radio buttons on the right
Modular Controller Architecture, a modular software framework
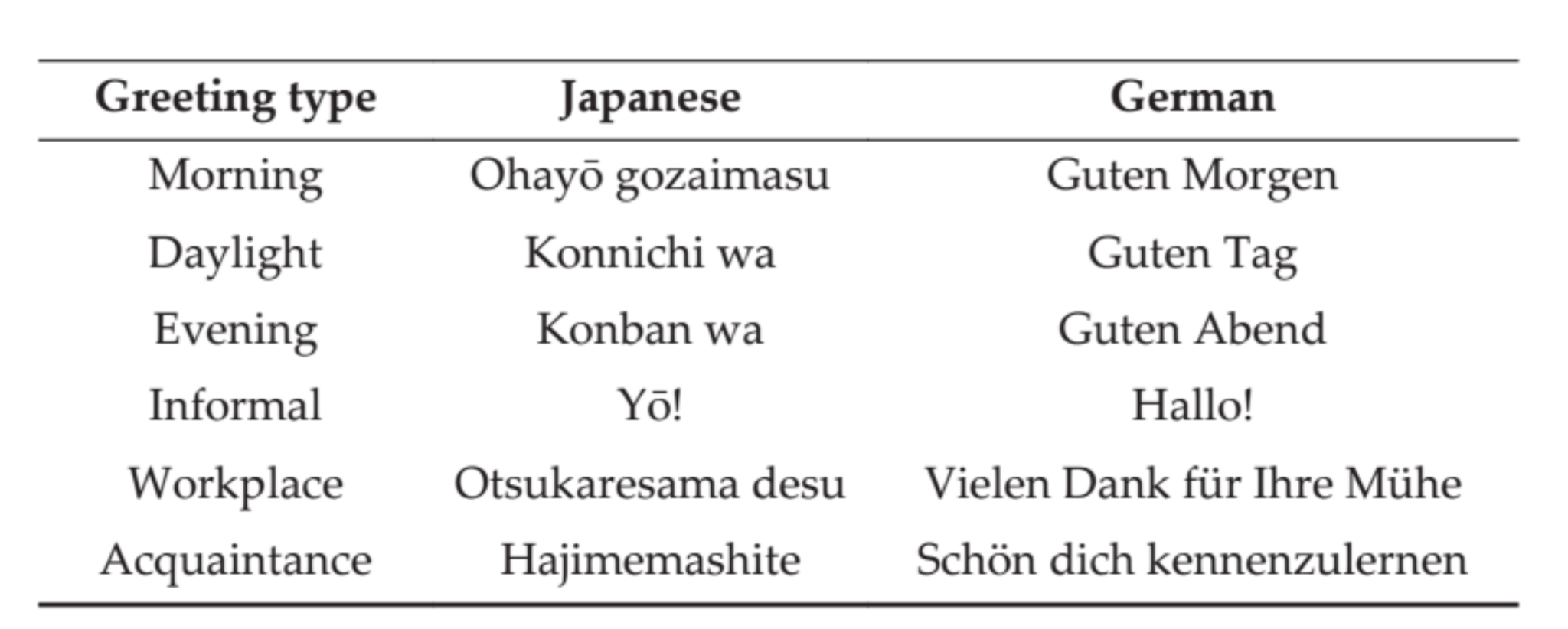
Implementation of words
Word of greeting uses two of the Japanese and German
For example,Japan it is common to use a specific greeting in the workplace 「otsukaresama desu」
where a standard greeting like 「konnichi wa」 would be inappropriate
In German, such a greeting type does not exist
but the meaning of “thank you for your effort” at work can be directly translated into German
the robot knows dictionary terms, but does not understand the difference in usage of these words in different contexts
table of greeting words
Implementation of words
These words have been recorded through free text-to-speech software into wave files that could be played by the robot
ARMAR does not have embedded speakers in its body
added two small speakers behind the head and connected them to another computer
Experiment description
Experiments were conducted at room as shown in Figure , Germany
Experiment description2
Participants were 18 German people of different ages, genders, workplaces
robot could be trained with various combinations of context
It was not possible to include all combinations of feature values in the experiment
for example there cannot be a profile with both [‘location’: ‘workplace’] and [‘social distance’: ‘unknown’]
the [‘location’:‘private’] case was left out, because it is impossible to simulate the interaction in a private context, such as one’s home
Experiment description3
repeated the experiment more than
for example experiment is repeated at different times
Change the acquaintance from unknown social distance at the time of exchange
we could collect more data by manipulating the value of a single feature
Statistics of participants
The demographics of the 18 participants were as follows
gender :M: 10; F: 8
average age: 31.33
age standard deviation:13.16
tatistics of participants
the number of interactions was determined by the stopping condition of the algorithm
The number of interactions taking repetitions into account was 30
gender :M: 18; F: 12
average age: 29.43
age standard deviation: 12.46
The experiment protocol is as follows 1~5
ARMAR-IIIb is trained with Japanese data
encounter are given as inputs to the algorithm and the robot is prepared
Participants entered the room , you are prompted to interact with consideration robot the current situation
The participant enters the room
The robot’s greeting is triggered by an operator as the human participant approaches
The experiment protocol is as follows 6~10
After the two parties have greeted each other, the robot is turned off
the participant evaluates the robot’s behaviour through a questionnaire
The mapping is updated using the subject’s feedback
Repeat steps 2–8 for each participant
Training stops after the state changes are stabilized
Results
It referred to how the change in the gesture of the experiment
It has become common Bowing is greatly reduced handshake
It has appeared hug that does not exist in Japan of mapping
This is because the participants issued a feedback that hug is appropriate
Results
Results
The biggest change in the words of the mapping , are gone workplace of greeting
Is the use of informal greeting as a small amount of change
Results
Limitations and improvements
The first obvious limitation is related to the manual input of context data
The integrated use of cameras would make it possible to determine features such as gender, age, and race of the human
Limitations and improvements
Speech recognition system and cameras could also detect the human own greeting
Robot itself , to determine whether the greeting was correct
The decision to check the distance to the partner , the timing of the greeting , head orientation , or to use other information , whether the response to a greeting is correct and what is expected
Limitations and improvements
It is possible to extend the set of context by using a plurality of documents
Different kinds of embodiment
Humanoid robot has a body similar to the human
robot can change shape , the size capability
By expanding this robot , depending on their physical characteristics , it is possible to start discovering interaction method with the best human yourself