title: A Novel Greeting System Selection System for a Culture-Adaptive Humanoid Robot
author: Tatsuki KANAGAWA
Yasutaka HIGA
profile: Concurrency Reliance Lab
lang: Japanese
# Abstract: Robots and cultures
* Robots, especially humanoids, are expected to perform human-like actions and adapt to our ways of communication in order to facilitate their acceptance in human society.
* Among humans, rules of communication change depending on background culture.
* Greeting are a part of communication in which cultural differences are strong.
# Abstract: Summary of this paper
* In this paper, we present the modelling of social factors that influence greeting choice,
* and the resulting novel culture-dependent greeting gesture and words selection system.
* An experiment with German participants was run using the humanoid robot ARMAR-IIIb.
# Introduction: Acceptance of humanoid robots
* Acceptance of humanoid robots in human societies is a critical issue.
* One of the main factors is the relations ship between the background culture of human partners and acceptance.
* ecologies, social structures, philosophies, educational systems.
# Introduction: Culture adapted greetings
* In the work Trovat et al. culture-dependent acceptance and discomfort relating to greeting gestures were found in a comparative study with Egyptian and Japanese participants.
* As the importance of culture-specific customization of greeting was confirmed.
* Acceptance of robots can be improved if they are able to adapt to different kinds of greeting rules.
# Introduction: Methods of implementation adaptive behaviour
* Adaptive behaviour in robotics can be achieved through various methods:
* reinforcement learning
* neural networks
* generic algorithms
* function regression
# Introduction: Greeting interaction with robots
* Robots are expected to interact and communicate with humans of different cultural background in a natural way.
* It is there therefore important to study greeting interaction between robots and humans.
* ARMAR-III: greeted the Chancellor of Germany with a handshake
* ASIMO: is capable of performing a wider range of greetings
* (a handshake, waving both hands, and bowing)
# Introduction: Objectives of this paper
* The robot should be trained with sociology data related to one country, and evolve its behaviour by engaging with people of another country in a small number of interactions.
* For the implementation of the gestures and the interaction experiment, we used the humanoid robot ARMAR-IIIb.
* As the experiment is carried out in Germany, the interactions are with German participants, while preliminary training is done with Japanese data, which is culturally extremely different.
# Introduction: ARMAR-IIIb
 # Introduction: Target scenario
* The idea behind this study is a typical scenario in which a foreigner visiting a country for the first time greets local people in an inappropriate way as long as he is unaware of the rules that define the greeting choice.
* (e.g., a Westerner in Japan)
* For example, he might want to shake hands or hug, and will receive a bow instead.
# Introduction: Objectives of this work
* This work is an application of a study of sociology into robotics.
* Our contribution is to synthesize the complex and sparse data related to greeting types into a model;
* create a selection and adaptation system;
* and implement the greetings in a way that can potentially be applied to any robot.
# Greeting Selection: Greetings among humans
* Greetings are the means of initiating and closing an interaction.
* We desire that robots be able to greet people in a similar way to humans.
* For this reason, understanding current research on greetings in sociological studies is necessary.
* Moreover, depending on cultural background, there can be different rules of engagement in human-human interaction.
# Greeting Selection: Solution for selection
* A unified model of greetings does not seem to exist in the literature, but a few studies have attempted a classification of greetings.
* Some more specific studies have been done on handshaking.
# Greeting Selection: Classes for greetings
* A classification of greetings was first attempted by Friedman based on intimacy and commonness.
* The following greeting types were mentioned: smile; wave; nod; kiss on mouth; kiss on cheek; hug; handshake; pat on back; rising; bow; salute; and kiss on hand.
* Greenbaum et al. also performed a gender-related investigation, while [24] contained a comparative study between Germans and Japanese.
# Greeting Selection: Factors on Classification
* 'terms' : same terms with different meanings, or different terms with the same meaning.
* 'location' : influences intimacy and greeting words. (private or public)
* 'intimacy' : is influenced by physical distance, eye contact, gender, location, and culture. (Social Distance)
* 'Time' : time of the day is important for the choice of words.
* 'Politeness', 'Power Relationship', 'culture' and more.
# Greeting Selection: Factors on Classification
* the factors to be cut are greyed out.
# Introduction: Target scenario
* The idea behind this study is a typical scenario in which a foreigner visiting a country for the first time greets local people in an inappropriate way as long as he is unaware of the rules that define the greeting choice.
* (e.g., a Westerner in Japan)
* For example, he might want to shake hands or hug, and will receive a bow instead.
# Introduction: Objectives of this work
* This work is an application of a study of sociology into robotics.
* Our contribution is to synthesize the complex and sparse data related to greeting types into a model;
* create a selection and adaptation system;
* and implement the greetings in a way that can potentially be applied to any robot.
# Greeting Selection: Greetings among humans
* Greetings are the means of initiating and closing an interaction.
* We desire that robots be able to greet people in a similar way to humans.
* For this reason, understanding current research on greetings in sociological studies is necessary.
* Moreover, depending on cultural background, there can be different rules of engagement in human-human interaction.
# Greeting Selection: Solution for selection
* A unified model of greetings does not seem to exist in the literature, but a few studies have attempted a classification of greetings.
* Some more specific studies have been done on handshaking.
# Greeting Selection: Classes for greetings
* A classification of greetings was first attempted by Friedman based on intimacy and commonness.
* The following greeting types were mentioned: smile; wave; nod; kiss on mouth; kiss on cheek; hug; handshake; pat on back; rising; bow; salute; and kiss on hand.
* Greenbaum et al. also performed a gender-related investigation, while [24] contained a comparative study between Germans and Japanese.
# Greeting Selection: Factors on Classification
* 'terms' : same terms with different meanings, or different terms with the same meaning.
* 'location' : influences intimacy and greeting words. (private or public)
* 'intimacy' : is influenced by physical distance, eye contact, gender, location, and culture. (Social Distance)
* 'Time' : time of the day is important for the choice of words.
* 'Politeness', 'Power Relationship', 'culture' and more.
# Greeting Selection: Factors on Classification
* the factors to be cut are greyed out.
 # Model of Greetings: Assumptions (1 - 5)
* The simplification was guided by the following ten assumptions.
* Only two individuals (a robot and a human participant): we do not take in consideration a higher number of individuals.
* Eye contact is taken for granted.
* Age is considered part of 'power relationship'
* Regionally is not considered.
* Setting is not considered
# Model of Greetings: Assumptions (6 - 10)
* Physical distance is close enough to allow interaction
* Gender is intended to be a same-sex dyad
* Affect is considered together with 'social distance'
* Time since the last interaction is partially included in 'social distance'
* Intimacy and politeness are not necessary
# Model of Greetings: Basis of classification
* Input
* All the other factors are then considered features of a mapping problem
* They are categorical data, as they can assume only two or three values.
* Output
* The outputs can also assume only a limited set of categorical values.
# Model of Greetings: Features, mapping discriminants, classes, and possible status
# Model of Greetings: Assumptions (1 - 5)
* The simplification was guided by the following ten assumptions.
* Only two individuals (a robot and a human participant): we do not take in consideration a higher number of individuals.
* Eye contact is taken for granted.
* Age is considered part of 'power relationship'
* Regionally is not considered.
* Setting is not considered
# Model of Greetings: Assumptions (6 - 10)
* Physical distance is close enough to allow interaction
* Gender is intended to be a same-sex dyad
* Affect is considered together with 'social distance'
* Time since the last interaction is partially included in 'social distance'
* Intimacy and politeness are not necessary
# Model of Greetings: Basis of classification
* Input
* All the other factors are then considered features of a mapping problem
* They are categorical data, as they can assume only two or three values.
* Output
* The outputs can also assume only a limited set of categorical values.
# Model of Greetings: Features, mapping discriminants, classes, and possible status
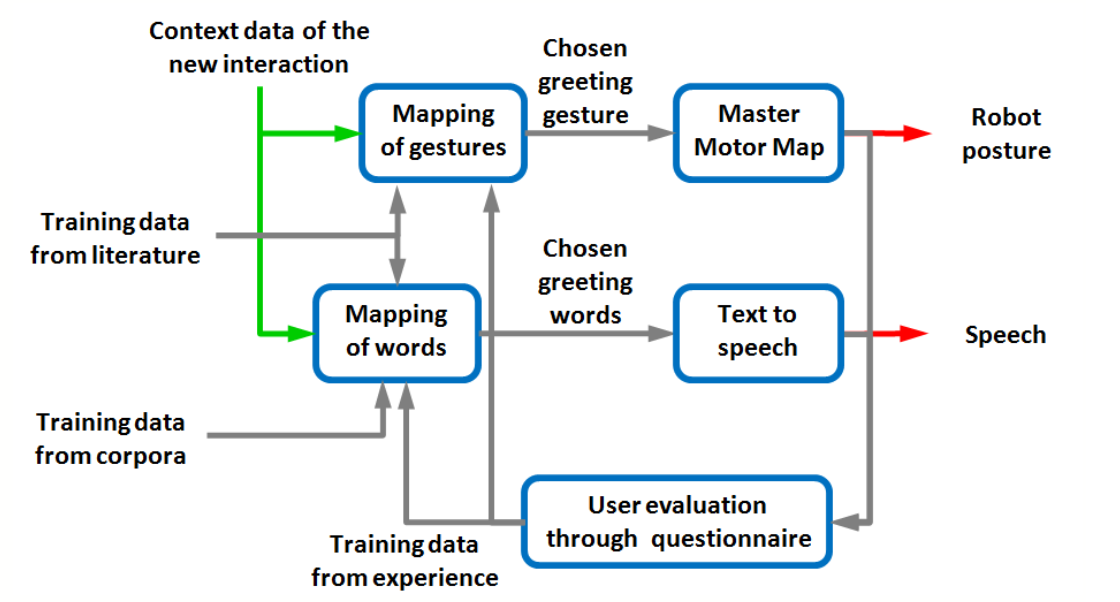
 # Model of Greetings: Overview of the greeting model
* Greeting model takes context data as input and produces the appropriate robot posture and speech for that input.
* The two outputs evaluated by the participants of the experiment through written questionnaires.
* These training data that we get from the experience are given as feedback to the two mappings.
# Model of Greetings: Overview of the greeting model
# Model of Greetings: Overview of the greeting model
* Greeting model takes context data as input and produces the appropriate robot posture and speech for that input.
* The two outputs evaluated by the participants of the experiment through written questionnaires.
* These training data that we get from the experience are given as feedback to the two mappings.
# Model of Greetings: Overview of the greeting model
 # Greeting selection system training data
* Mappings can be trained to an initial state with data taken from the literature of sociology studies.
* Training data should be classified through some machine learning method or formula.
* We decided to use conditional probabilities: in particular the Naive Bayes formula to map data.
* Naive Bayes only requires a small amount of training data.
# Model of Greetings: Details of training data
* While training data of gestures can be obtained from the literature, data of words can also be obtained from text corpora.
* English: English corpora, such as British National Corpus, or the Corpus of Historical American English, are used.
* Japanese: extracted from data sets by [24, 37, 41-43]. Analyze Corpus on Japanese is difficult.
# Model of Greetings: Location Assumption
* The location of the experiment was Germany.
* For this reason, the only dataset needed was the Japanese.
* As stated in the motivations at the beginning of this paper, the robot should initially behave like a foreigner.
* ARMAR-IIIb, trained with Japanese data, will have to interact with German people and adapt to their customs.
# Model of Greetings: Mappings and questionnaires
* The mapping is represented by a dataset, initially built from training data, as a table containing weights for each context vector corresponding to each greeting type.
* We now need to update these weights.
# feedback from three questionnaires
* Whenever a new feature vector is given as an input, it is checked to see whether it is already contained in the dataset or not.
* In the former case, the weights are directly read from the dataset
* in the latter case, they get assigned the values of probabilities calculated through the Naive Bayes classifier.
* The output is the chosen greeting, after which the interaction will be evaluated through a questionnaires.
# Model of Greetings: Three questionnaires for feedback
* answers of questionnaires are five-point semantic differential scale:
1. How appropriate was the greeting chosen by the robot for the current context?
2. (If the evaluation at point 1 was <= 3) which greeting type would have been appropriate instead?
3. (If the evaluation at point 1 was <= 3) which context would have been appropriate, if any, for the greeting type of point 1?
# Model of Greetings: feedback and terminate condition
* Weights of the affected features are multiplied by a positive or negative reward (inspired by reinforcement learning) which is calculated proportionally to the evaluation.
* Mappings stop evolving when the following two stopping conditions are satisfied
* all possible values of all features have been explored
* and the moving average of the latest 10 state transitions has decreased below a certain threshold.
# Model of Greetings: Summary
* Thanks to this implementation, mappings can evolve quickly, without requiring hundreds or thousands of iterations
* but rather a number comparable to the low number of interactions humans need to understand and adapt to social rules.
# TODO: Please Add slides over chapter (3. implementation of ARMAR-IIIb)
# Greeting selection system training data
* Mappings can be trained to an initial state with data taken from the literature of sociology studies.
* Training data should be classified through some machine learning method or formula.
* We decided to use conditional probabilities: in particular the Naive Bayes formula to map data.
* Naive Bayes only requires a small amount of training data.
# Model of Greetings: Details of training data
* While training data of gestures can be obtained from the literature, data of words can also be obtained from text corpora.
* English: English corpora, such as British National Corpus, or the Corpus of Historical American English, are used.
* Japanese: extracted from data sets by [24, 37, 41-43]. Analyze Corpus on Japanese is difficult.
# Model of Greetings: Location Assumption
* The location of the experiment was Germany.
* For this reason, the only dataset needed was the Japanese.
* As stated in the motivations at the beginning of this paper, the robot should initially behave like a foreigner.
* ARMAR-IIIb, trained with Japanese data, will have to interact with German people and adapt to their customs.
# Model of Greetings: Mappings and questionnaires
* The mapping is represented by a dataset, initially built from training data, as a table containing weights for each context vector corresponding to each greeting type.
* We now need to update these weights.
# feedback from three questionnaires
* Whenever a new feature vector is given as an input, it is checked to see whether it is already contained in the dataset or not.
* In the former case, the weights are directly read from the dataset
* in the latter case, they get assigned the values of probabilities calculated through the Naive Bayes classifier.
* The output is the chosen greeting, after which the interaction will be evaluated through a questionnaires.
# Model of Greetings: Three questionnaires for feedback
* answers of questionnaires are five-point semantic differential scale:
1. How appropriate was the greeting chosen by the robot for the current context?
2. (If the evaluation at point 1 was <= 3) which greeting type would have been appropriate instead?
3. (If the evaluation at point 1 was <= 3) which context would have been appropriate, if any, for the greeting type of point 1?
# Model of Greetings: feedback and terminate condition
* Weights of the affected features are multiplied by a positive or negative reward (inspired by reinforcement learning) which is calculated proportionally to the evaluation.
* Mappings stop evolving when the following two stopping conditions are satisfied
* all possible values of all features have been explored
* and the moving average of the latest 10 state transitions has decreased below a certain threshold.
# Model of Greetings: Summary
* Thanks to this implementation, mappings can evolve quickly, without requiring hundreds or thousands of iterations
* but rather a number comparable to the low number of interactions humans need to understand and adapt to social rules.
# TODO: Please Add slides over chapter (3. implementation of ARMAR-IIIb)